Victor Kuc Engineering Summer Project
Edge Finding Robot
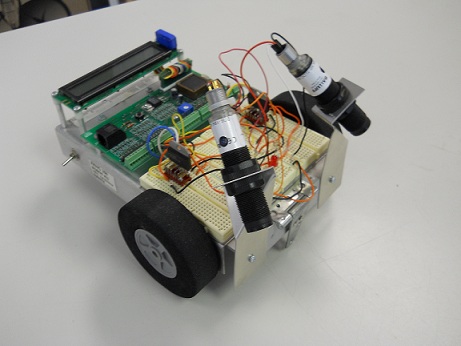
The Edge Finding robot operates using two proximity detecting lasers that either see ground in front of them to produce logic outputs 0-no ground or 1-sees ground. The mobil robot stays on the tables surface using simple logic: if the right sensor detects a dropoff, the left motor will stop and the right motor will turn the left away from the edge. The robot preforms a similar action with the left sensor. If both sensors detect a dropoff, both motors turn in reverse with a slight turn11/29/2011. If both motors detect a surface, then the robot moves forward.
The motor+wheel combination that proved to be problomatic in the arm-robot does not cause any such problems in the edge-finding robot. The motors work better for this robot because it does not require the kind of precision that the arm-robot does.

The programming was done in C for the mobile Robot and a combination of C and Visual Basic 6 for the XY robot