Victor Kuc Engineering Summer Project
XY Arm Robot Page
Version 1
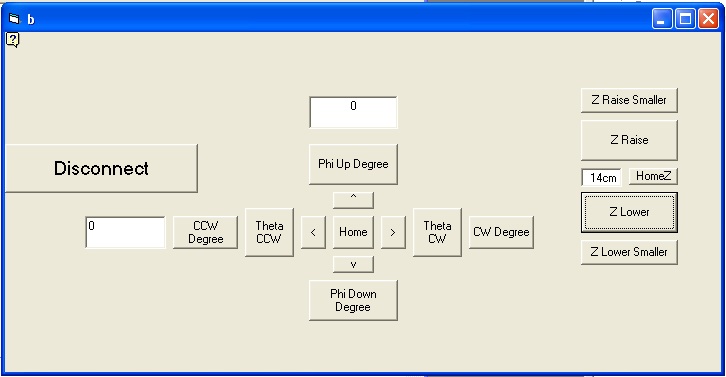
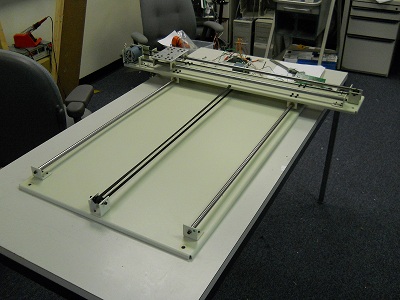
This robot operates using a 30" XY table combined with a robot arm. The X axis and Y axis on the table are operated by 2 stepper motors. The robot is controled by a computer using a Visual Basic program. The VB program outputs a character, (X,Y,Z, F or T) followed by + or -.
The commands go out of the computer via com-port, through an RS-232 chip and into a 18F452 Master chip.
This master chip passes the + or the - to either the XY board or the arm depending on the character (X or Y for the XY board and Z, F or T for the arm).
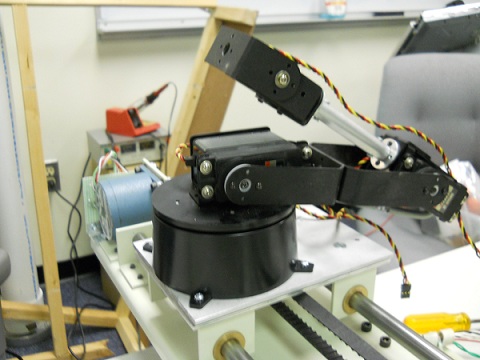
One of the two of the slave chips receives the + or - and raises or lowers the arm or stepper motor by a predetermined amount. The main problem and why the arm design was revised was that between the two servos, it was too complicated to make a perfect raise and lower motion.
Version 2
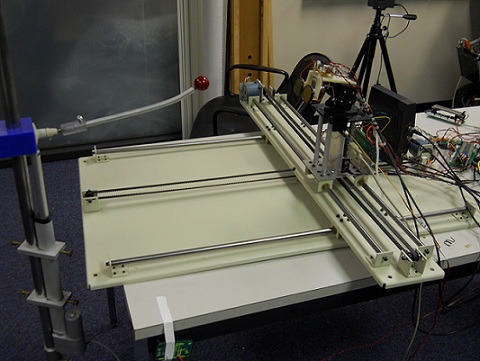
The second version fixed the problem with the first version by moving the object up and down with one servo instead of moving the arm up and down with two. The new design uses a vertical actuator (bottom left) and a new pan/tilt mount for the sensors (bottom right). The two are shown together in the bottom center image.

The arm and vertical actuator are controlled by the user through a graphical user interface made in Visual Basic 6 (shown below)